头大,学的什么东西。By the way,图还得我自己来。
PDF放前面,Markdown放这里。
题型
- 选择题 10 分
- 名词解释 25 分
- 简答题 36 分
- 计算分析 15 分
- 论述 14 分
测量方法
根据获得测量值的方法
- 直接测量 实际结果 = 测量结果 y = x
- 间接测量 实际结果 y = 一个测得值 x 或多个测得值 x1,x2,…,xn 的函数。 y = f(x) y = f(x1,x2,…,xn)
- 组合测量 若实际结果必须经过求解联立方程组求得,称为组合测量。 如:$$
\left\{\begin{matrix}x_{1}=f_{1}(y_{1},y_{2},…,y_{m}) \\x_{2}=f_{2}(y_{1},y_{2},…,y_{m}) \\\vdots \\x_{3}=f_{3}(y_{1},y_{2},…,y_{m}) \end{matrix}\right.
$$
根据测量方式
- 偏差式测量 仪表指针的位移决定被测量的量值。精度较低。
- 零位式测量 用指零仪表的零位反映测量系统的平衡状态,测量系统平衡时,用已知的标准量决定被测量的量值。
- 微差式测量 将被测量与已知标准量相比较,取得差值后,用偏差法测得此值。
根据测量条件
- 等精度测量 影响和决定误差大小的全部因素始终保持不变。
- 不等精度测量 不同测量条件下,用不同精度的仪表,不同的测量方法,不同的测量次数,不同的测量者。
根据被测量变化快慢
- 静态测量 被测量在测量过程中固定不变。不需要考虑时间因素对测量的影响。
- 动态测量 被测量在测量过程中不断变化。
根据测量敏感元件是否与被测介质接触
- 接触式测量
- 非接触式测量
根据测量系统是否向被测对象施加能量
- 主动式测量
- 被动式测量
检测系统的构成
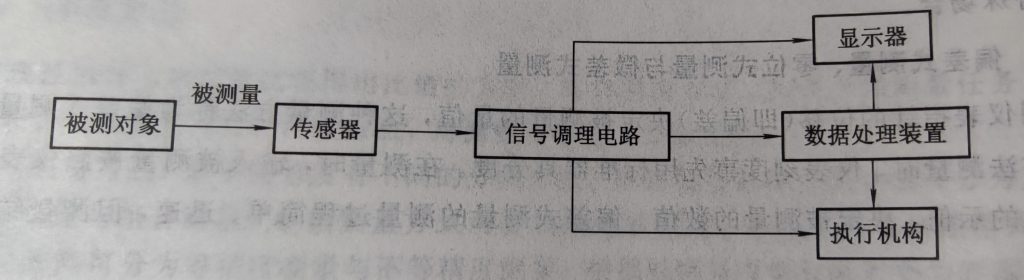
传感器感受被测量的大小,并输出相对应的输出信号。
信号调理电路对传感器输出的电信号进行处理。
显示器将所得信号变成人的感官可以接受的信号。
数据处理装置对测得的数据进行处理、运算、分析、对动态测试结果进行频谱分析。
执行机构通断、控制、调节、保护。
传感器的静态特性和动态特性
静态特性
- 灵敏度$$
S=\frac{\Delta y}{\Delta x}
$$
输出量增量与输入量增量之比。S 越大越灵敏。输入输出特性曲线上某点的斜率就是灵敏度 - 线性度 传感器的输出与输入之间数量关系的线性程度。
- 迟滞 相同工作条件下,输入量由小到大(正行程)及输入量由大到小(反行程)变化期间其输入输出特性曲线不重合的现象称为迟滞。差值称为迟滞差值。最大迟滞差值 ΔHmax 与满量程输出值 YFS 称为迟滞误差,用 γH 表示。$$
\gamma_{H}=\frac{\Delta H_{max}}{Y_{FS}}\times 100\%
$$ - 重复性 相同工作条件下,输入量按同一方向做全量程连续多次变化时,所得特性曲线不一致的程度。
- 漂移 输入量不变,输出量随时间变化。
动态特性
输入量随时间变化时传感器的响应特性。
金属应变片的工作原理
电阻应变效应:导体在外界作用下产生机械变形(拉伸 / 压缩)时,其电阻值相应发生变化。
被测量使弹性元件产生应变,应变再由应变片产生相应的电阻变化,因而通过测量电阻,可以得到被测量的大小。
半导体应变片工作原理
半导体材料的电阻率 ρ 随作用应力的变化而变化。
电阻应变片测量电路
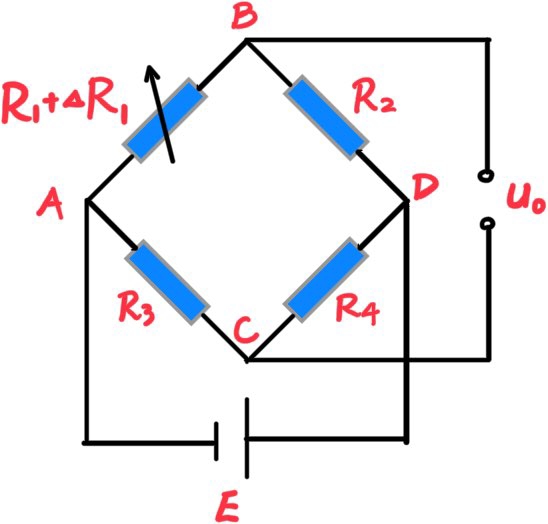
不平衡电桥
$$
易知,E_{D} = E,E_{A} = 0. \\ 初状态为平衡,故有 \\ E_{B} = E_{C} \\ 即有 \\ \frac{R_{2}}{R_{1}}=\frac{R_{4}}{R_{3}} \\ 当 R_{1} 变化,有 \\ E_{B}=E \cdot (\frac{R_{1}+\Delta R_{1}}{R_1+R_2+\Delta R_1})\\ E_C=E \cdot (\frac{R_3}{R_3+R_4})=E \cdot (\frac{R_1}{R_1+R_2})\\ 此时 U_0=E_B-E_C\\ 由糖水不等式,显然 E_B>E_C\\ \begin{split} U_0&=E\cdot \frac{(R_1+\Delta R_1)(R_1+R_2)-R_1(R_1+R_2+\Delta R_1)}{(R_1+R_2+\Delta R_1)(R_1+R_2)}\\ &=E\cdot\frac{\Delta R_1\cdot R_2}{(R_1+R_2)^2+\Delta R_1(R_1+R_2)} \end{split}\\ 相对于 (R_1+R_2)^2 来说,\Delta R_1(R_1+R_2) 可忽略不计\\ 分数上下同除以 R_1^2,令 n=\frac{R_2}{R_1}\\ 故\\ U_0=\frac{n}{(1+n)^2} \cdot \frac{\Delta R_1}{R_1}\cdot E
$$
自感式电感传感器工作原理
利用线圈自感量的变化测量。
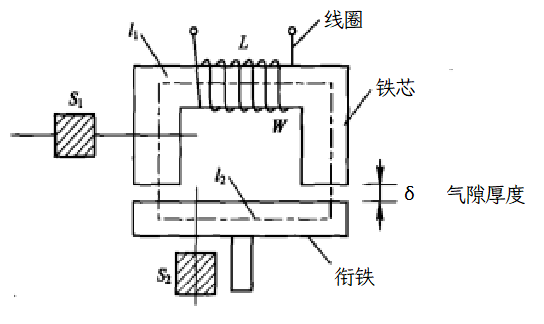
传感器的运动部分与衔铁相连,被测量变化时,衔铁产生位移,引起磁路中电阻变化,使得电感线圈的电感量变化,测量出这种变化,就能确定衔铁位移量大小和方向。
差动变压器式传感器工作原理
变压器的次级线圈产生感应电压,两个相同的次级线圈接成差动的形式,即反向串联,即成为差动变压器。铁芯做成活动的,则变成差动变压器式传感器。铁芯运动时,在次级绕组中产生感应电势,测量这种电势即可得到被测量。
衔铁向上运动,则 U2 > 0。
电涡流式传感器工作原理
块状金属导体置于变化的磁场中或在磁场中做切割磁感线运动时,导体内将产生旋涡状的感应电流,称为电涡流。
当传感器激励线圈通过交变电流 I1 ,线圈周围产生交变磁场 H1 ,使得置于此磁场中的被测导体产生电涡流 I2 ,产生反向的新的交变磁场 H2。使得传感器激励线圈的电感量、阻抗、品质因数变化,即线圈等效阻抗发生变化。
线圈等效阻抗 Z的变化与被测金属导体的电阻率 ρ 、磁导率 μ、几何形状/尺寸因子 r、激磁电流频率 f、线圈与被测金属导体的距离 x有关,若使得其中一个为变量,其它因素不变,则可通过测量 Z 来测量这个变化量。
电容式传感器的工作原理
将被测非电量的变化转换成电容量变化。
平行板电容器的电容如下
$$
C=\frac{\varepsilon A}{d}\\ \\ \varepsilon-平行板间介质介电常数\\ A-极板所覆盖的面积\\ d-极板间距离
$$
当被测参数变化使得式中某一参数变化,就可以把参数变化转换为电容变化,通过测量电路就可转换为电量输出。
分类
- 变极距型
- 变面积型
- 变介质型
压电效应、逆压电效应
某些电介质当沿着一定方向对其施力而使其变形时,内部产生极化现象,同时在它两个表面上产生符号相反的电荷,外力去掉后,又重新恢复到不带电的状态,称为 压电效应。
当在电介质极化方向施加电场时,电介质也会产生几何变形,称为 逆压电效应。
霍尔传感器原理与应用
霍尔效应
置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上垂直于电流和磁场的方向上将产生电势差,该电势差称为霍尔电势差。
应用
- 霍尔式位移传感器
- 霍尔式转速传感器
- 霍尔计数装置
光电式传感器
外光电效应
在光线作用下,物体内电子逸出物体表面向外发射的现象。
这种电子称为光电子。
内光电效应
在光线作用下,物体的导电性能发生变化或产生光生电动势的效应。
两类
- 光电导效应 在光线作用下,半导体材料吸收入射光子能量,若能量大于等于半导体材料的禁带宽度,就激发出 电子 – 空穴对,使载流子浓度增加,半导体导电性增加,阻值减低。是光敏电阻的原理。
- 光生伏特效应 光线的作用下能够使物体产生一定方向的电动势的现象。是光电池的原理。
光敏电阻
无光照时,光敏电阻阻值很大,电路中电流很小。被一定波长的光范围的光照后,其阻值急剧减小,电路中电流迅速增大。
光敏二极管
没有光照射时,反向电阻很大,反向电流很小。被光照射时,形成光电流,光照强度越大,光电流越大。
因此不受光照射时,光敏二极管处于截止状态,而受到光照射时,光敏二极管处于导通状态。
光敏三极管
集电极电流是光电流的 β 倍,因此光敏晶体管具有放大作用。
光电池
原理是光生伏特效应,其本质是一个大面积的 PN 结,当光照射到 PN 结的一个面,光子能量大于半导体材料的禁带宽度,电池每吸收一个光子就产生一对自由电子和空穴,电子 – 空穴对从表面向内扩散,建立一个和光照强度有关的电动势。
光电耦合器件
是由发光元件(如发光二极管)和光电接收元件(如光敏二极管、光敏三极管等)合并使用,以光作为媒介把输入端的电信号耦合到输出端的一种器件。
- 用于实现电隔离的光电耦合器 有时可以取代继电器、变压器、斩波器。
- 用于检测物体位置或有无物体的光电开关
体积小、寿命长、无触点、抗干扰能力强、输出输入绝缘、可以单向传输 模拟信号或数字信号。
光电开关的工作原理
光电开关是一种利用感光元件对变化的入射光加以吸收,并进行光电转换,同时加以某种形式的放大和控制,从而获得最终的控制输出“开”“关”信号的器件。
气敏传感器的工作原理
原理:利用气体在半导体表面的氧化和还原反应导致敏感元件阻值变化。当氧化型气体吸附到 N 型半导体上,还原型气体吸附到 P 型半导体上时,半导体载流子减少,使电阻值增大。将上述条件反过来则使其电阻值减小。
湿敏传感器的工作原理
湿敏传感器是能够感受外界湿度变化,并通过器件材料的物理或化学性质变化,将湿度转化成有用信号的器件。
超声波传感器的工作原理与应用
利用超声波在超声场中的物理特性和各种效应而研制的装置称为超声波传感器、换能器或探测器。
超声波探头:是超声波的发射器和接收器。
压电式:利用压电材料的逆压电效应把高频电振动转换成高频机械振动,产生超声波。利用压电效应把超声振动转换为电信号,接收超声波。
应用:
- 超声波物位传感器:超声波物位传感器是利用超声波在两种介质的分界面上的反射特性制成的。如果从发射超声脉冲开始,到接收探头接收到反射波为止的这个时间间隔为已知,就可以求出分界面的位置,利用这种方法可以对物位进行测量。
- 超声波流量传感器:超声波流量传感器的测定方法是多样的,但目前应用较广的主要是超声波传播速度变化法。超声波在流体中传播时,在静止流体和流动流体中的传播速度是不同的,利用这一特点可以求出流体的速度,再根据横截面积,便可以知道流体的流量。
红外感应系统的工作原理
红外辐射的本质是热辐射,温度低的物体辐射的红外线波长长,温度高的物体辐射的红外线波长短。在一般常温下,所有物体都是红外辐射的发射源,但发射的红外波长不同。红外感应实际就是根据物体因表面温度不同会发出不同波段的红外光这一特性进行检测的。
编码器的原理与应用
原理
编码器是将角位移和线位移转换成数字量的一种数字传感器,它以高精度、高分辨率和高可靠性被广泛用于各种位移的测量。
应用
- 角度位置测量
- 数字测速
热电传感器
热电偶测温原理
两种不同材料的导体(或半导体)组成一个闭合回路,当两接点温度 T 和 T0 不同时,则在该回路中就会产生电动势,这种现象称为热电效应,该电动势称为热电势。这两种不同材料的导体或半导体的组合称为热电偶,导体 A、B 称为热电极。
三个基本定律
中间温度定律 在热电偶测温回路中,tc为热电极上某一点的温度,热电偶 AB 在接点温度为 t、t0 时的热电势 EAB( t, t0) 等于热电偶 AB 在接点温度 t、tc 和 tc、t0 时的热电势 EAB( t, tc ) 和 EAB( tc, t0) 的代数和,即$$
E_{AB}(t,t_0)=E_{AB}(t,t_C)+E_{AB}(t_C,t_0)
$$
均质导体定律 由两种均质导体组成的热电偶,其热电动势的大小只与两材料及两接点温度有关,与热电偶的大小尺寸、形状及沿电极各处的温度分布无关。这条定理说明:热电偶必须由两种不同性质的均质材料构成。
中间导体定律 在热电偶测温回路内,接入第三种导体时,只要第三种导体的两端温度相同,则对回路的总热电势没有影响。